| Picaxe
Robotoy One
|
|||
(click images for better view)
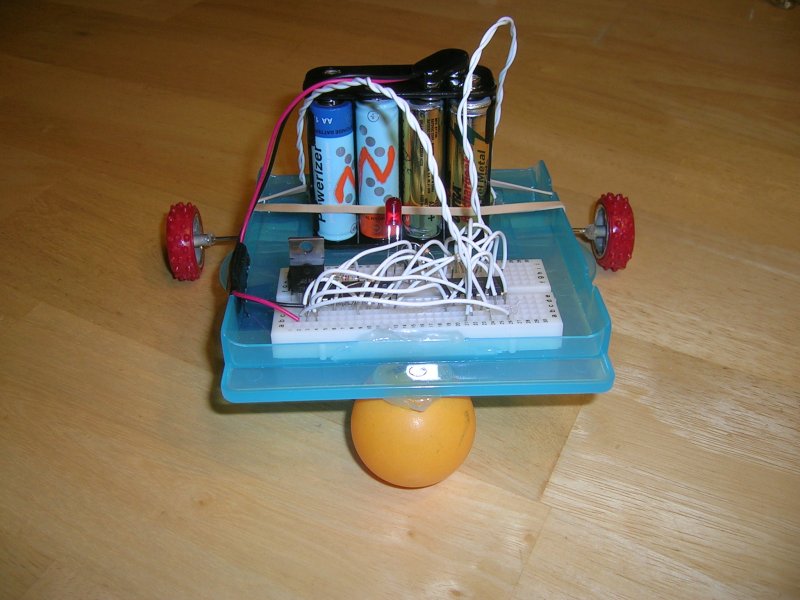
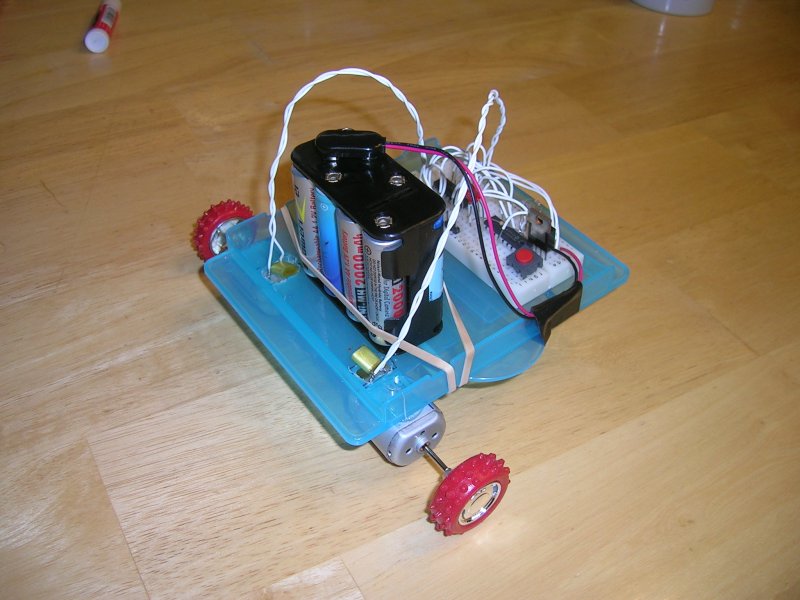
I actually prefer to call this a robotoy because it is on the very low end of robotics. Sure it runs circles (literally) around BEAM robots and it is truly programmable. But whereas this machine uses 2 DC motors without feedback, the roomba uses optical encoders on each wheel. There are probably a couple of other differences too. For all I know, real robots may not even use a hotglued ping-pong ball for support, though I'd find this hard to believe. Some things which I could add but probably won't:
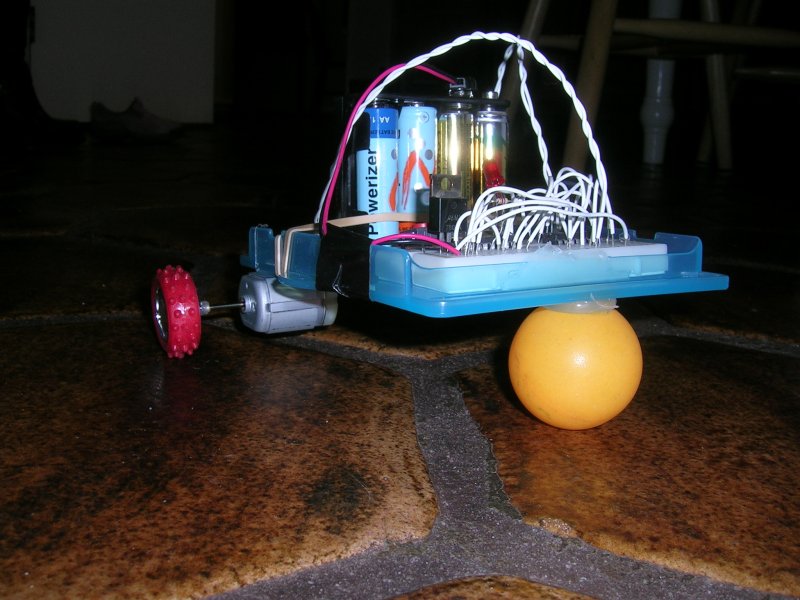
But did I mention that this robotoy has a light? The hotglued solderless breadboard was cheap, fast, allows for infinite flexibility, and doesn't drop parts if held upside down. I should use this construction method more often. No schematic ... use your imagination. Actually I haven't entered the 18X in my schematic capture program. Parts count:
The robotoy works fine for what it does... move in circles, wander randomly, scare the dog, hold papers on a desk. Using ungeared motors connected to fairly large-radius wheels, however, is problematic. It requires substantial current to drive the motors... which requires more AA cells (8 to be exact) to power the motors... which adds weight to the chassis... which increases the demand for adequate current through the motors. Gearing would help substantially. And while the pingpong ball works, it has drastically different coefficients of friction when it slides on smooth surfaces compared with when it slides on carpet. This translates to problems when trying to figure out how to control the motors to approximate a 90-degree turn. Some sample code is here but don't get your hopes up. It only demonstrates the control mechanism. This code is explicitly released under the GPL. And this page is licensed under a Creative Commons Attribution 2.5 License. Write me if you find this project useful. Link to this page if it is relevant.. Strobe effect may be psychologically damaging or cause flashbacks to a pre-color cinema era. This project is provided without any warranty. |